※この記事は2023年2月に神戸新聞へ掲載されたものです。
日本をはじめ世界各国では、少子高齢化が進んで要介護人口が増加しています。そのため、福祉介護ロボットのニーズも日に日に大きくなっています。
私たちサービスロボット研究室では、要介護一歩手前の高齢者の方々の生活をロボットがサポートすることで、QOL(Quality of Life=生活の質)が高い状態を実現しながら体の衰えを防ぐ「介護予防」の考え方を取り入れたロボット開発を進めています。
これらのロボットには、ユーザーの体の動きに寄り添って優しく支える技術が欠かせません。しかし、ロボットにとって人に「寄り添いつつ」「必要な時に安全に支える」のはとても難しいことです。ロボットをはじめ全ての機械は、こう動くべきだという見本(これを制御目標軌道と言います)を忠実に再現するようにできています。
一方で、私たち人間は、いつも同じ動作をしているようでも、実は少しずつ動きが異なります。従って、人に寄り添うロボットを実現するためには、振れ幅を持つ人の動作を読み解き、その人の意思で行われる安全な動作と、一瞬の油断から来る危ない動作を瞬時に判別して、適切に動作する必要があります。
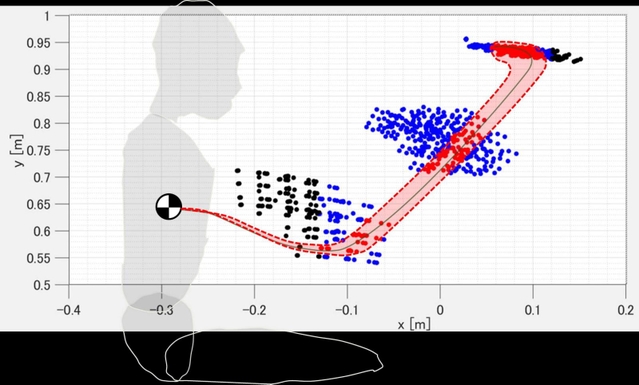
このようなロボットを実現するために、私たちの研究室では人間の動作をつくり出す多様な筋肉の弱り具合が、人間の動作にどのように影響を及ぼすかを研究しています。例えば図のように、立つ動作をつかさどるユーザー一人一人の筋肉を調べることで、ユーザーの自然な動作の振れ幅が見えてきます。
開発中の起立支援ロボットは、この振れ幅の中であれば、ユーザーに優しく寄り添いますし、もし自然な動作を逸脱するような危険な場面では、しっかり支えてユーザーの安全を守ります。
私たちの研究では、人・ロボット・環境の関わりを重視しており、単一の技術分野のみに精通するだけでは達成されず、関連する分野への幅広い理解と人に対する深い洞察力が必要です。ここ三田の地で、多岐分野に関する知識を持ち、またそれをとりまとめて具現化するセンスに優れる後輩を輩出したいと願っています。
